
在利用机器人视觉来进行图像的检测与识别过程中,如果要确定三文空间里的某个物体的三文几何特征位置与其在数字图像里对应的点的关系,就一定要建立一个基于成像原理的几何模型,其中的参数就是相机的参数。通常情况下这些参数需要用实验以及分析计算才可以获得,求解相关的参数的过程便是相机标定。在机器视觉和图像的检测识别中,标定相机参数都是很重要的步骤,其结果的精度高低以及算法是否稳定会直接影响到图像检测目标识别的准确性。所以,良好的相机标定可以为进一步工作做基础,提升相机标定的精度是最近科研的重点。
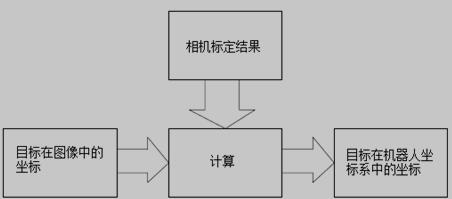
图2.1 相机标定过程
根据相机模型的不同,相机的参数也不同。相机成像模型一般有三种:针孔成像模型,正交投影模型,透视投影模型。针孔模型可以较好地解释成像过程,所以目前的标定算法主要应用该模型。针孔模型标定的研究关键主要是求解相机的内参数(Intrinsic Parameters)和外参数(Extrinsic Parameters)。本章第一节介绍了相机的针孔模型,第二节研究了一些常用的相机标定的方法,并实现了一种算法。
2.1 相机的针孔(Pinhole)模型
在针孔模型中,为了定量地描述物体在图像阵列中的像素位置和场景位置之间的关系,首先必须定义一系列坐标系 自动物料分拣机器人的视觉定位技术研究(3):http://www.youerw.com/zidonghua/lunwen_27721.html