
5.4 本章小结 27
结 论 28
致 谢 29
参 考 文 献 30
1 绪论
1.1 输入成形技术简介
实际工程中,为了加快响应速度,减少能量损耗,经常要用到柔性材料,但柔性材料极易产生振荡。这就给学者们带来了一个难题——如何消减柔性体的振荡?这也是最近控制工程研究领域的一个热点。
先看一个工程实例——人造地球卫星。
如1.1所示,大多数人造地球卫星都利用太阳能电池板为其提供能量,卫星越大,需要的能量越多,太阳能电池板的面积也就越大。由于太阳能电池板自身所具有的跨度大、质量轻、刚度低、结构阻尼弱、板间连接刚度低等特殊性,任意一个微小的扰动都极易激起结构的振动。然而,在卫星运行过程中,多种干扰因素不可避免,如空间碎片、太阳风、热辐射、温度冲击等外部干扰,以及卫星的调姿、变轨等内部扰动。因此太阳能电池板的振动是难以避免的。这种振动对卫星非常有害:轻则,影响卫星正常工作,降低卫星的姿态稳定度和指向精度,缩短卫星的工作寿命;重则,可以直接危害卫星的安全,造成灾难性后果。航天历史上这样的事故不断发生[1]。
人造地球卫星
1958年美国第一颗卫星“探险者1号”,由于其4根鞭状天线的振动耗散很多能量而导致卫星翻滚,任务失败。
1982年美国发射的“陆地卫星-4”的观测仪器旋转部分,受到太阳能电池板驱动系统的干扰而产生微小的振动,大大降低了拍摄图像质量。(图1.2是人造地球卫星送回的北京故宫航拍图片)
1982年日本发射的技术实验卫星也由于柔性太阳能电池板驱动系统和姿态控制系统间的耦合振动干扰而没能达到预期的效能。
1990年美国著名的哈勃空间望远镜由于热变形引起弹性振动,导致姿态稳定度未达到要求的指标,从而降低了图像质量。
由此可见,柔性结构的振动的确给卫星带来了一定影响,抑制柔性结构体的振荡势在必行[2]。
1.2 卫星传回的北京故宫航拍图片
输入成形,作为一种前馈控制方法在柔性结构体控制中已取得令人瞩目的成就[3-6]。这种技术的应用使得对柔性结构体的操作只产生很小的振动,甚至是在对被控对象建模存在误差的情况下也可以取得较好的效果。在输入成形技术中,输入信号被一系列脉冲卷积后再作用于被控对象,这样产生的振荡比直接输入控制信号产生的振荡小很多。设计输入成形器就是计算出这一组脉冲序列的幅值和到来时间,而计算出这些只需要知道被控对象的频率和阻尼比,所以输入成形是一种非常简单实用的消除余振的方法。
最早的输入成形设计方法是由OJM Smith在上世纪50年代晚期提出的,OJM Smith的控制方法称为Posicast控制[3]。Posicast控制的工作原理如图1.3所示。
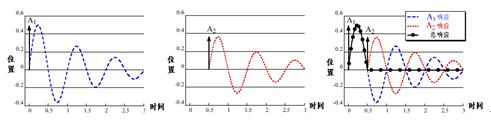
图1.3 Posicast控制的工作原理[3]
脉冲信号 和 分别作用于柔性系统,会各自产生一组振荡。如果两个脉冲信号的幅值和时间合适,则脉冲信号 和 产生的振荡可以相互抵消。
图1.4展示了Posicast控制的工作流程:输入命令首先由成形器的脉冲序列 和 调制,之后再作用于系统,调制后的命令称为成形输入信号,对系统输入成形信号,可以减小或消除剩余振动。
 柔性系统输入成形控制方法研究+文献综述(2):http://www.youerw.com/zidonghua/lunwen_10190.html
柔性系统输入成形控制方法研究+文献综述(2):http://www.youerw.com/zidonghua/lunwen_10190.html