
1.2 国内外发展现状
1.3 本论文的研究内容
航模的实现通常是由遥控飞行的远程控制,远程控制信号,并将接收到的信号的接收机远程控制器的电力谐波驱动器发送给电调和舵机。舵机接收到信号后转向齿轮,通过方向舵控制飞行姿态。除此之外,电调.收到信号.之后,首先为接收机和接收机.其他的.通道供电,其次再接.收油门的控制.信号。要想实现控制电机的转速,需要使航模电调接收到油门发出的信号,随后通过单片机调节PWM波的占空比实现控制电机转速的要求。
在设计过程中,由于强磁场模型的特殊性,所以控制模型的电机也有特殊的要求。需要让设计师做模型的质量要轻,体积尽可能的小。
主要研究内容有:
(1)单片机的选择采用.ATmel.公司生产的..ATmega8.单片机.,.ATmega8.单片机是.一种新.型.A.V..R.单片机,内部采用了.先进的.R.I.S.C.精.简指令集结构,在省.电,抗干扰能..力强,稳定性和灵活性.更完美。
(2)无刷直流电机与有刷直流电机相比,具有体积小、工作效率高、没有碳刷磨损等优点,采用无刷直流电机;无刷直流电机在有位置传感器与无位置传感器相比,具有精准换相的优点,所以本次的课题研究采用无位置传感器的控制方式。
(3)在实现转子位置检测中,从一般有四种方法,分别为:.三次谐波.电势法、电.感法、反电势法.以.及状态.观测法,相互比.较,因实现.简单、易于.实现等特.点选用反.电势检测法。
(4)系统硬件电路的设计。
(5)系统控制软件的设计。
2 航模无刷直流电机概述
2.1 航模系统概述
航模系.统是.一套成所有电路以及信号.的电.子设备,他通过利..用无线电波作为载体传.送给操作者,模型根.据接.收到操作者.的操.作的指令完.成各种.飞行动作。航模的系统框图如图2-1所示:
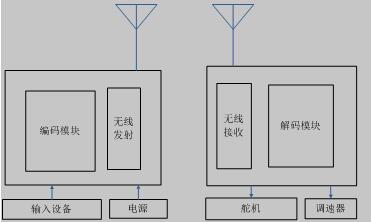
图..2-1 航.模.系统的..电.子设备
2 .2 无刷直流电机概述
无刷直流..电动机(BrushLess .Direct Current. Motor,以下简称..BLDCM.)是近年来越.来越普遍,.越.来越.实用的一.种型直流..电动机。与之相对应的是有刷直流电动机,两者在电磁结构上相同,不同点在于,无刷直流电动机的位置传感器没有固定的机械装置,相反,有刷直流电动机在位置传感器通过机械的方法得到位置信号,从而达到换相的目的。
在上个世纪30年代,大部分电动机都是有刷直流电动机,一些多学者便很有兴趣去研究用其他的方法来换相,慢慢的,用电子换向器来替换原来的电刷换相成为一种研究主流。在.1978.年,标志着以电子换向器为主的技术进入到实用的阶段。随着社会的进步,科技的发展,中国的改革开放使得科技成为第一生产力,无刷直流电机也在我国的到了快速的发展以及应.用。现在,在国家层面,包括:汽车制造,数控机床,发电机,铁路建设等一些应用。此外,无刷直流电动机的应用已进入民用领域,包括人们的衣食住行,电动汽车,冰箱,空调等不胜枚举。因此,对于无刷直流电动机的研究大到对国家的贡献,小到人民的日常生活都有十分重要的意义。
2.3 无刷直流电动机的控制方法
无刷直流电动机..的控制方式.有两种,有位置传感..器.的控制方式.和.无位置.传感器的控制方式..两种。两者的区分主要..据有无转子的.位置.传感器来划分。
2.3.1 有位置传感器控制方式
无刷直流电动机有位置传感器控制的内部结构就是在定子上放置位置传感器,所以叫做有位置传感器控制。位置传感器需要不停地工作,时刻检测转子在转动过程中所处的位置,并把得到的位置信号通过A/D转换为电信号,从而使电路得到正确位置的信息,控制其逻辑开关电路的导通与闭合,达到换相的目的,最终使转子连续旋转。如今,在定子...上的位置.传..感器包括很多种,其中.磁敏式、电.磁.式、光.电.式三种是常..使.用的位置..传感器。但是,由于位置传感器加入到定子中,无形的把系统变得很复杂,并且加大了文修的成本,而且使控制系统也增加了很大的难度,同时在位置转换器工作时换产生噪声。 ATmega8单片机反电动势法的航模电调的设计+电路图(3):http://www.youerw.com/zidonghua/lunwen_40444.html