
(4)上位机管理软件设计与调试。在RSView 中进行设计与调试,通过调试发现存在的问题,并且解决,从而达到完善系统的目的。
2.控制方案和控制算法
2.1 控制方案设计
锅炉水位的控制系统,应该从汽包水位的动态性能入手。粗看起来的话,汽包水位的动态性能可能会和单容水槽的动态性能一样,都是蒸汽流量和给水量会影响汽包水位的高低。但是实际的情况却并不是如此,这其中最重要的一点就是水循环系统中充满着含有大量蒸汽汽泡的水,蒸汽汽泡的体积很容易会因为外界的原因而改变体积的大小,如:汽包的压力和炉膛热负荷,它们一旦发生了变化,蒸汽汽泡的体积也会随之而变化,一旦蒸汽汽泡的体积变化了,就算水循环系统的总水量没有发生变化,汽包水位也会发生变化,从而影响到水位的稳定性。
影响汽包水位的主要因素有三个:给水量、汽轮机耗汽量和燃料量。如果将给水量突然增加,汽包水位就会增加;但需要考虑给水的温度会低于汽包内水的温度,给水将会吸收原有汽包内水的热量,导致蒸汽量下降,并且蒸汽包的体积也会减小,汽包水位会下降;两者综合汽包水位还是增加。如果将汽轮机耗汽量突然增加,一方面汽包内水的蒸发量变大从而导致水位下降;另一方面,汽轮机耗汽量的突然增加迫使了蒸汽包的体积膨胀,从而导致水位上升;对大中型锅炉而言,后者的影响远远大于前者,所以在汽轮机耗汽量突然增加的一段时间内,水位不但没有下降,反而会上升,这种反常的现象被称为“假水位现象”。如果燃料量产生变化,蒸汽流量也会产生变化,也会发生“假水位现象”,但比汽轮机耗汽量突然增加发生的“假水位现象”要缓和的多。
方案一:双冲量控制系统
双冲量指的是同时引入汽包水位和蒸汽流量两个测量信号,这个控制方案比起单冲量控制,可以更大的提高汽包水位的控制质量。如果汽轮机耗汽量突然增大,一方面由于“假水位现象”使得汽包水位会暂时的有所升高,将使调节机构错误地减少给水量;另一方面汽轮机耗汽量的增大又通过控制系统调节使给水量增大,实际给水量的增减情况要根据实际情况通过参数整定来确定。当假水位现象消失以后水位信号和蒸汽信号都能做出正确的指挥调节机构动作。
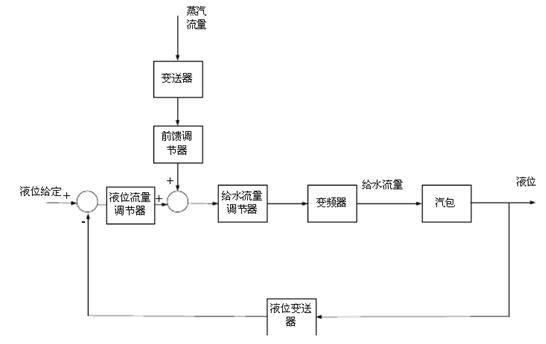
图2.1 双冲量控制系统框图
方案二:三冲量控制系统
三冲量控制是前馈—串级复合控制系统,系统考虑到给水流量的变化可以通过串级控制的方法让给水量的扰动通过内回路自行调节。三冲量控制系统包含给水流量控制回路和汽包水位控制回路两个控制回路以及一个蒸汽流量前馈通道,实质上是蒸汽流量前馈与水位-流量串级系统组成的复合控制系统。串级控制系统的主参数是汽包水位,副参数是给水流量,主调节器是给水流量调节器,副调节器是液位调节器。一方面可以克服给水扰动,使给水流量自行调节,另一方面可以有效地抑制“假水位现象”。当蒸汽流量发生变化时,锅炉汽包水位控制系统中的给水流量控制回路可迅速粗调来改变进水量的大小,然后再由汽包水位调节器完成水位的细调来文持汽包水位的稳定。
图2.2 三冲量控制系统框图
2.2 控制算法
众所周知,要让控制系统拥有良好的控制性能,不仅要对控制方案进行正确的设计和选取,还要选择正确的控制算法。
在控制系统中,根据给定信号和反馈信号这两者之间的偏差的比例(P)、积分(I)和微分(D)来进行控制的PID控制器是应用最广泛的自动控制器。它具有适用面广、控制的参数相互之间独立、原理简单、便于实现、参数的选定较为简单等优点;并且在理论上可以得到证明,对于过程控制中的典型对象─“一阶惯性加纯滞后”和“二阶惯性加纯滞后”的控制对象,最好的控制方案就是PID控制。PID控制的调节规律是连续系统动态品质校正的一种有效方法,它参数的整定方式简便,结构改变方便灵活,能够简单的改变为比例积分(PI)、比例微分(PD)、比例积分微分(PID)等控制器。 基于Rockwell PLC的锅炉水位控制系统设计(4):http://www.youerw.com/zidonghua/lunwen_13408.html