
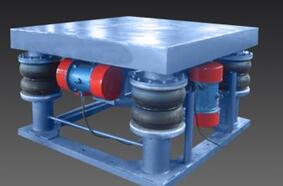
多向振动实验机主要性能参数:如右图所示,该振动平台主要有支架、台面、振动机构、减振机构四部分组成。在振动机构的带动下做横向、纵向、上下等三文振动,故而得名。
振动平台的振动机构主要由若干台振动电机、传动板构成,振动电机的数量一般为偶数,如:2、4、6、8、10等,振动电机的型号决定了三文振动平台的主要技术参数。
振动平台还可分为普通振动平台和三文振动平台。普通振实台运用一台或两台电机均可,主要产生上下振动的效果。三文振动台则要求,上下,左右,螺旋振动。其优点是在振实的过程中尽量保持物料在箱体表面的均匀。34146
振动平台的减振机构主要由减振弹簧组成,共分为橡胶弹簧、复合弹簧、充气弹簧等几种。钢簧的噪音略大,如果承重不是太大的话尽量选择橡胶簧。台面的厚度制定和电机的激振力有直接关系。振动电机底板尽量不使用槽钢,槽钢对振动电机的振动起不到缓冲作用,长期运行容易撕裂焊缝。论文网
根据动力元件的不同,还分为液压驱动低频高载振动平台、电机驱动高频低载振动平台,使得在进行产品加工和检测时有了更为广泛的选择空间。
比如,优尔自由度运动平台是有6个自由度的并联机构,最早由英国学者D.Stewart提出,也称Stewart平台。最初的设想是把这种机构用于工业机器人,但是,随着研究工作的深入和加强,Stewart平台己形成一个庞大的体系,并联机构的理论分析和工程应用已成为一个热门课题,应用领域也在不断扩展。
2传感器在振动平台实验机上的运用
随着电子技术的发展,机械制造智能化和电子化程度的不断提高,通常的机械系统已经难以解决某些与工件性能方面要求有关的问题,而被电子控制系统代替。传感器的作用就是根据规定的被测量的大小与测量数据,计算后定量提供有用的电输出信号的部件,即将振动的机械信号转换成电量信号的变换器。多自由度摇摆振动模拟平台,主要由控制及监控系统、模拟驱动系统、设备安装平台等部分组成。控制及监控系统由计算机、姿态仿真软件、各种运动控制器、传感器阵列及其接口系统组成,控制方式为二级分级控制,其系统由下位计算机、伺服放大器、位移传感器、压力传感器等组成,用于接收来自上位计算机的液压缸位置指令,控制电机的动作,并向上位机返回有关电机的信息。上位机用于获取优尔自由度平台的位置状态,经计算转换为6个电机的转动指令,判断所给平台位置状态有否超出运动范围,向各单机控制系统发出电机转动控制指令,并接收来自电机系统的信息,对平台运动进行监视。
在振动平台实验机上的测实系统主要包括传感器部分、数据分析采集部分、和平台部分,而传感器部分主要采用位移传感器和压力传感器。
压力传感器:其作用是将加载力这一非电量的物理量转换成电量。在多向振动实验机上即将模拟载荷转换成电量信号。压力传感器的种类繁多,如电阻应变片压力传感器、半导体应变片压力传感器、压阻式压力传感器、电感式压力传感器、电容式压力传感器、谐振式压力传感器及电容式加速度传感器等。这里采用的是谐振式压力传感器,它具有高精度(0.01%)、高分辨率、高抗干扰能力、适于长距离传输、能直接与数字设备相连接 、高稳定性和高可靠性。
位移传感器,:其作用是将位移这一非电量的物理量转换成电量。在几何变形实验机上即将最大变形量转换成电量信号。在生产过程中,位移的测量一般分为测量实物尺寸和机械位移两种。按被测变量变换的形式不同,位移传感器可分为模拟式和数字式两种。模拟式又可分为物性型和结构型两种。常用位移传感器以模拟式结构型居多,包括电位器式位移传感器、电感式位移传感器、自整角机、电容式位移传感器、电涡流式位移传感器、霍尔式位移传感器等。数字式位移传感器的一个重要优点是便于将信号直接送入计算机系统。这种传感器发展迅速,应用日益广泛。 多向振动实验机文献综述和参考文献:http://www.youerw.com/wenxian/lunwen_31581.html