
光学三维重建技术是信息光学的前沿学科,以美国、德国等为主的西方国家在该方面进行了大量的研究,并取得了一定的科研成果。进入21世纪以来,国内外学者对视觉法、Voronoi图法、飞行时间法以及结构光法等方法进行了大量的深入研究。其中,基于结构光的三维重建技术是目前使用的较为广泛的一种三维重建技术。本节的主要内容是对相关的三维重建方法进行简单的介绍。77740
1 基于视觉的三维重建
基于视觉的三维重建技术主要是指单目视觉法、双目视觉法和三目视觉法,其中双目视觉法应用较广泛。单目视觉法(monocularvision)是指只使用一个相机进行图像采集实现三维重建的方法。单目视觉法有两种方式:一种是通过图像的明暗度、轮廓或者纹理等二维特征来推导出物体或场景的深度信息,这种方式比较简单,使用的图像较少,但是对重建的场景要交较多,且重建精度一般,故而应用较少。另一种单目视觉法是通过相机从不同角度(或
位置)对同一场景进行图像采集,通过匹配这些图像的相同特征点来获取场景的三维信息,实现对场景的三维重建。这种方法可以通过使用大量的同一场景的不同图像来提高重建的精度,但是相应的计算量将大大增加,从而使重建得速度减慢。
双目视觉法(binocularvision)是一种基于人眼视差原理的三维重建方法。它是使用两个相机同时对同一场景进行图像采集,然后通过将不同相机采集到的图像进行特征匹配获取场景的三维空间分布信息。这种基于人眼视差原理的重建方式比较容易理解和应用,但是由于视野遮挡导致某点只在一个相机中成像、或者场景超出了某一相机的视野范围,就无法完成匹配实现重建。针对双目视觉中存在的问题,一些学者开始考虑三目视觉甚至多目视觉进行三维重建。它们的希望是通过增加多个相机约束来解决双目视觉存在的问题[5]。论文网
2区域Voronoi图法
Vonoroi图法是指提取物体的断层轮廓线并将其用多边形进行表示,之后再对其进行分割和扩展实现三维重建。该方法的原理是先将轮廓线进行三角剖分,然后然后获取各个三角形的外接圆心,并连接得到区域voronoi图像;为了实现立体的三维重建,要继续对不同的相邻断层进行相互约束,再次进行三角剖分,最后将不同断层间获得的顶点按照一定的规则进行连接,实现立体扩展完成物体三维轮廓重建[6]。
3飞行时间法
基于飞行时间法的三维重建技术的原理是根据测量发射信号和接收信号之间的时间差或者相位差等来计算物点到系统的距离,再根据其他的几何关系获取物点三维坐标。通常依据光速的不变性,可以通过记录出射光线和反射光线之间的时间差来计算距离,但是由于光速很快,时间差极短,系统的响应速度对误差的影响很大。基于飞行时间法的三维重建的另一种方式是测量接收信号和调制信号之间的相位差来计算物点的三维坐标信息的[7]。
4结构光法
基于结构光的三维重建系统是由结构光投影仪、图像采集器(一般为CCD相机)和工作区间三部分组成。系统工作过程分为系统的标定、图像获取及处理、对应过程以及三维点坐标计算四个过程。关于结构光系统的研究重点是系统的标定和对应过程两个方面,分别是为了获取系统最佳布局和提高点的对应精度[8。9]。
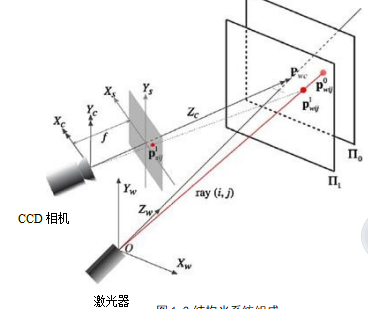
图1。2结构光系统组成
美国学者AlbertDipanda提出了一种使用激光点阵列系统实现三维形貌重建的方法,其系统组成如图1。2。该方法的核心问题是解决对应问题,在特定情况下实现像点与原始激光射线的匹配[10-13]。A。Dipanda提出的对应方法能够自动获取三维形貌重建系统的结构(即照相机、激光发射器和测量物体之间的相对位置),实现直接、清晰的对应。同时,他提出的分割单元算法能够有效解决实时对应过程问题。 光学三维重建技术国内外研究现状:http://www.youerw.com/yanjiu/lunwen_89381.html