
当前全向移动机构主要有以下形式:
(1) 全轮转向式全向移动机构。图1.1是典型的全轮转向式全向移动机构,动力通过蜗轮蜗杆、锥齿轮4使驱动轮3转动[5]。竖直方向转动通过蜗轮蜗杆7、圆柱齿轮6带动轮架旋转而实现,通过电机2和5的控制可以实现全向移动,其承载能力相对较大。其缺点是结构复杂,需要专门的转向和驱动机构,并且曲线运动能力比较差。论文网
(2) 正交轮式全向移动机构。 图1.2是正交轮式全向移动机构示意图,它除了能在平面上进行任意的移动,还可以绕垂直轴进行自传。两轮相互配合可以实现在平面上的全方位运动。其缺点是制造难度大,稳定性差并且易产生较大的噪音,承载能力小。30044
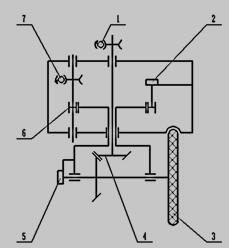
图1.1 全轮偏转式全向移动机构 图1.2 正交轮式全向移动机构
(3) 球轮驱动式全向移动机构。图1.3是球轮结构及球轮移动机构示意图,该球轮可以绕 三根轴转动,由伺服电机驱动轮圈[5]。通常运用四个球轮组成具有全方位移动能力的机构。其缺点是驱动复杂,可靠性相对较低,对环境的要求较高。
图1.3 球轮结构及球轮移动机构
(4) 麦克纳姆全方位轮。 图1.4是麦克纳姆轮示意图,其按照一定的倾斜角度在轮毂一周布置多个被动的小辊子。该轮能够连续地向前滚动有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。 图1.5是三个麦克纳姆全方位轮构成的移动机构。其缺点是与地面的接触面积小,行走效率低;辊子对制造的精度要求,精度低时噪音大;地面适应性差。
图1.4 麦克纳姆全方位轮 图1.5三个麦克纳姆全方位轮构成的移动机构
全向移动机构具有灵活度高的优势,并且能在狭窄空间内进行运动,因此在家用服务机器人中具有很大意义。很多国家运用全向移动机构试制了很多机器人。但由于上述各种移动机构的缺点,全向移动机构在现实生活中并未普及。 全向移动机构的国内外研究现状:http://www.youerw.com/yanjiu/lunwen_25553.html