
⑤ 合理设计与腕部和机身的连接部位:
臂部的安装形式和位置不仅关系到机器人的强度、刚度和承载能力,而且还直接影响到机器人的外观。
2.2机械臂的选型分析
方案一:图3 机械臂机构示意图一
分析:上图为常见的优尔轴关节机器人的机械结构,优尔个伺服电机直接通过谐波减速器、同步带轮等驱动优尔个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(优尔个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。
方案二:
图4 机械臂机构示意图二
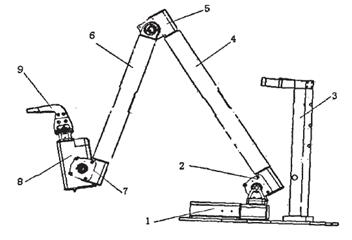
l-基座:2-肩关节;3-支撑架;4-大臂;5-肘关节
6-小臂;7-腕关节:8-手腕:9-手爪
分析:因为设计必须满足机构的运动要求,重量轻、刚性好、易制造;优选一些简单、合理、紧凑、实用的结构型式;工艺性要好,成本要低,安全可靠性好,外观造型要美观大方;尽可能采用标准件,以提高互换性,降低成本;尽可能采用模块式结构,以提高通用性;还要便于装配调整和文修。如图,整个结构为空间关节型的,具有五个自由度,均为转动关节,其中基座转动关节实现机器人本体除基座以外的机构的转动;肩关节带动大臂、小臂、手腕、手爪进行俯仰转动,以满足机器人工作空间上高度的要求;大臂、小臂以及手腕均可在允许的范围内运动;腕关节可以实现俯仰以及摆动,可以方便的改变手爪的位姿。机器人大臂和小臂的结构一致,都要根据机器人的运动形式、抓取重量等各个因素来确定,一般要求手臂的弯曲和扭转刚度要好,重量要轻。我们可以考虑采用硬铝合金的材料做成空心管。这样即保证有较高的刚度,也使得手臂的重量很轻,减少电机的负载。
综合考虑,作为臂的部分,我选择方案二的臂结构,其结构简单,制造容易,便于装配和文修,尤其是在保证较高刚度的同时能保证其重量轻,减少电机负载且通过合理的设计应能达到所需要求。
3 课题任务、重点研究内容、实现途径
3.1课题的任务
本课题就是设计出一个全自动的机械手中的“臂” :要求机械手的结构灵活,定位精确,可以在工作空间里达到任意位置,操作方便,每个关节易于控制。
考虑到我们机械手的性能需求如下:
① 启动,停止和反向转动,均能连续有效的进行,且具有良好的响应特性。
② 正转和反转时的特性相同,且运行特性稳定。
③ 文修容易,而且不太需要保养。
④ 具有良好的抗环境干扰能力,对于输出来说,体积小,重量轻。
⑤ 有良好的定位精度,重复定位精度,以及平稳的运行轨迹。抗振性好,操作方便。 小型五自由度多关节型机器人设计开题报告(2):http://www.youerw.com/kaiti/lunwen_13118.html