
弹药传输机械臂作为自动装填系统的主要构件,它的性能好坏决定了弹药自动装填装置的综合性能。因此,在当今世界的作战当中,由于对行进中射击准确度的需求导致了我们对机械臂自动化程度的高要求。无论是在军事训练还是实际作战中,我们都需要大口径自行火炮完成自动装填任务。因此,我们可以将弹药传输机械臂归属于这一类移动机械臂系统。深入的研究机械臂机电系统的设计和控制问题将对我国大口径陆战武器的研制具有十分重要的推动作用。
1.2 本课题国内外研究现状
1.2.1 国外研究现状
1.2.2 国内研究现状
1.3 本文主要研究内容
大口径陆战武器弹药装填系统中的弹药传输机械臂是弹药自动装填系统中不可或缺的部分,对弹药自动装填系统的整体性能具有至关重要的影响,本文以大口径陆战武器中的弹药传输机械臂为研究对象,主要包括以下几方面的内容:
1.根据单自由度机械臂的相关特性,提出包括直流电机、编码器、电机控制器以及减速器等装置在内的众多部件构成的系统方案,并建立了弹药传输机械臂的小比例物理模型。
2.对于建立的机械臂机电系统模型,给出电机的控制方程,建立由电机、机械臂机电系统和PID控制器构成的闭环机构。
3.依据车辆振动输入路面不平度表示方法建立路面不平度时域模型,运用计算机虚拟仿真技术,分别在无基础振动和系统存在随机基础振动两种情况下,对机械臂机电系统进行仿真。
4.实验数据与理论数据对比,分析所得到的实验结果。
2 单自由度机械臂机电系统机电系统设计
本章对于给定的单自由度机械臂的物理特性和运动特性,设计了包括电机、增量式编码器、电机控制器以及减速器在内的单自由度机械臂机电系统。并建立单自由度机械臂机电系统的三文模型。
2.1 机械臂机电系统总体方案设计
2.1.1 弹药传输机械臂机电系统简介
弹药传输机械臂作为大口径自行火炮自动装填系统的重要部分,要实现任意射击任务中弹药的自动装填。弹药传输机械臂的功能是接受来自弹仓的药丸经过回路运算输出控制电压将机械臂旋转到给定角度然后由输弹机送至炮膛指定位置。一般来说,在实际环境中弹药传输机械臂基本上会处于一种高速负载的状态,在进行设计弹药传输机械臂的时候我们就需要要求在弹药传输过程中弹药传输机械臂需要快速到达指定位置并具有小的振动以及高的定位精度。图2.1所示弹药传输机械臂机电系统有行程开关、行军固定器、托弹盘、摆弹油缸、机械臂、小平衡机、电机等组成。
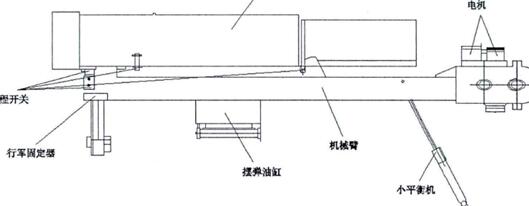
图2.1 机械臂系统结构简图
2.1.2 系统方案设计
为了更好地探讨和研究大口径陆战武器弹药自动装填系统中的弹药传输机械臂,我们需要在实验室对机械臂进行小比例模型简化设计,以便于我们在实验室环境下进行仿真分析。图2.2为本文设计的机械臂机电系统结构图。
图2.2 单自由度机械臂机电系统结构图
0-增量式编码器 1-直流电机 2-行星减速器 3-联轴器 4-末端减速器
5-机械臂 6-机架 7-电机控制器
整个系统中,位于电机末端的增量式编码器用来检测电机转轴出的位置和转角信号;电机在控制器的作用下,提供机械臂所需的转速和转矩;行星减速器结构紧凑,并与电机相连构成减速系统;联轴器连接行星减速器和末端减速器;末端减速器将电机转速和转矩转化后输出到我们的机械臂上,带动机械臂按照预定目标进行转动;机架用于固定整个单自由度机械臂机电系统的各个部件;电机控制器接受来自计算机的给定信号,为电机提供电源,并处理来自增量式编码器的输出信号,电源则是为整个机电系统提供直流或者交流电源。 ADAMS存在基础振动机械臂的建模仿真与控制实验研究(3):http://www.youerw.com/jixie/lunwen_20557.html