
第五章是相关实验验证。我采用第一种视觉定位技术实现了移动机器人的自定位,第二种视觉定位技术实现了在MATLAB上的仿真。
2 移动机器人平台及机器人操作系统
2.1 移动机器人平台
轮式移动机器人集环境感知、实时规划与决策、行为控制与执行固定任务等多种功能于一体,是一个综合系统。它能通过传感器感知环境和本身状态,实现在向目标点运动的同时躲避障碍物的自主运动,从而完成一定的任务。轮式滑动转向移动机器人(WSMR)易于控制、结构简单、性能稳定,驱动性好。但由于它也是全固定式的带有四轮驱动机构的移动机器人,是一个非线性的、时变且具有多变量的、强耦合的系统,我们不能用简单的运动学和动力学模型来表示,所以定位控制也就变成了其中较为复杂的一个问题。
我们的轮式移动机器人平台有如下功能:
1)运动控制:机器人在各种地形环境中,均可执行前进、后退、刹车、转弯等动作,实现爬坡、下坡等功能;
2)图像获取:通过Kinect,获取当前图像信息,包括RGB图像和深度图像信息;
3)信息智能处理:汇总机器人各方面信息,紧接着对数据进行处理,再下达给运动执行机构,实现相关功能[16]。
移动机器人工作流程图如下:
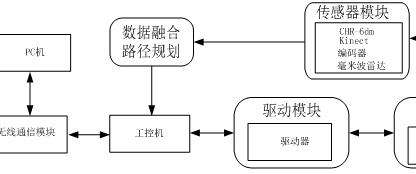
图2.1 移动机器人工作流程图
轮式移动机器人在实际生产生活中的应用,大概有如下几个方面的研究问题:
1)工作环境的自适应性,根据环境特征的不同,需要建立相应的运动学和动力学模型。如何建立相符合的运动学和动力学模型是一个比较复杂的问题。
2)机器人的精确定位
3)移动机器人的运动控制,机器人动力学被控模型复杂。执行机构由于机械原因带来的误差、自身的转动惯量和质量、地面不同的摩擦系数和机器人真实的位姿、轮胎充气压力情况和轮地之间打滑等因素都会对机器人的动力学特性产生影响。
4)协作完成任务,现如今,一个机器人可以完成的任务有限,机器人间协同合作的问题成为了一个热点的问题。
2.2 机器人操作系统
2.2.1 发展历史
机器人操作系统(Robot Operating System,ROS)起源于2007年机器人技术公司Willow Garage个人的机器人项目(Personal Robots Program) 与斯坦福大学人工智能实验室两个项目之间的合作,2008年到现在一直由Willow Garage个人来推动,已有优尔年多的时间。随着PR2那些不可思议的“行为”,比如叠衣服,自我充电,做饭等,ROS也得到了更多的关注。Willow Garage公司也表示希望借助于强大的开源力量使PR2最终成为无所不能的机器人。
2.2.2 设计目标
ROS是用于机器人的一种开源的后操作系统,也就是次级操作系统。它能提供类似操作系统提供的功能,包括硬件抽象描述、共用功能的执行、底层驱动程序管理、程序发行包管理、程序间的消息传递,同时它也提供一些可以用于获取、建立、编写和运行多机整合的工具程序和库。
ROS首要的设计目标是在机器人研发领域提高代码的重复使用率。ROS运行机制是一种分布式的处理框架(也称为Nodes)。这种机制的优势是使得可执行文件能单独的被设计,并且在运行的时候实现松散耦合。ROS也支持代码库的联合使用,这使得协作仍能被分发。为了更好地实现共享和分发,数据包(Packages)和栈(Stacks) 可以封装这些过程。这种设计让独立地决定和实施工作有了可能性。上面提到的所有功能都可以由ROS提供的基础工具来实现。2.2.3 主要特点 移动机器人视觉定位控制研究(3):http://www.youerw.com/jisuanji/lunwen_19101.html